介紹
無損檢測(cè)(NDT)行業(yè)正在經(jīng)歷一個(gè)重要的技術(shù)進(jìn)步,全聚焦法(TFM)檢測(cè)設(shè)備正在進(jìn)入市場(chǎng)。TFM方法是相控陣超聲檢測(cè)(PAUT)技術(shù)向前邁出的重要一步。然而,一些PAUT實(shí)踐者可能仍然對(duì)TFM及其與全矩陣捕獲(FMC)的關(guān)系,以及傳統(tǒng)PAUT與TFM/FMC處理的區(qū)別感到困惑。本應(yīng)用說明為那些熟悉PAUT成像的人提供了對(duì)TFM成像的基本理解。為了簡(jiǎn)潔和清晰,將超聲模式轉(zhuǎn)換的相關(guān)方面放在一邊。
傳統(tǒng)PAUT與TFM的根本區(qū)別
在PAUT和TFM中,都使用一個(gè)多單元探頭在試樣中發(fā)射脈沖超聲波,并記錄回波的時(shí)間軌跡(波形)。然后這些波形被組裝起來,在被檢查的工件上產(chǎn)生反射器的圖像。超聲圖像可以看作是一組稱為幀的子圖像。例如,PAUT中的扇形掃描是由從不同角度捕獲的a掃描(振幅對(duì)時(shí)間)的排列組成的。單個(gè)a掃描在扇形掃描的定義中充當(dāng)幀。PAUT策略包括以盡可能快的速度處理這些幀,實(shí)時(shí)顯示和刷新全局圖像。
傳統(tǒng)PAUT與TFM的根本區(qū)別在于信號(hào)采集和幀處理策略。
傳統(tǒng)PAUT成像
為了演示PAUT中的幀捕獲過程,這里以s掃描為例。s掃描由單獨(dú)的幀組成,這些幀對(duì)應(yīng)于從不同角度捕捉到的a掃描。在一次采集過程中,一組元件(稱為光圈)同時(shí)發(fā)射和記錄。在每個(gè)元件上加一個(gè)延遲,使超聲波波束轉(zhuǎn)向所需的角度,并將其聚焦在工件所需的深度上。每一幀都由折射角度和聚焦深度來定義。因此,需要獲取的幀數(shù)就是構(gòu)成全局圖像的離散角度的數(shù)量。
PAUT的優(yōu)勢(shì)在于,它需要的收購數(shù)量有限。發(fā)射光束是各發(fā)射機(jī)聲幅材料“物理疊加”的結(jié)果,接收光束是綜合前端電子學(xué)快速疊加的結(jié)果。因此,通過PAUT獲得的圖像顯示非常快。PAUT的缺點(diǎn)是框架只聚焦在一個(gè)恒定的深度。位于焦點(diǎn)區(qū)域外的反射器看起來很模糊,比出現(xiàn)在焦點(diǎn)區(qū)域內(nèi)的相同反射器稍微大一些。
全聚焦法(TFM)有助于解決這個(gè)分辨率問題。TFM的基本概念是在多個(gè)深度的焦點(diǎn)線上顯示振幅,從而在任何地方生成高分辨率的圖像,而不僅僅是在單個(gè)深度線上。
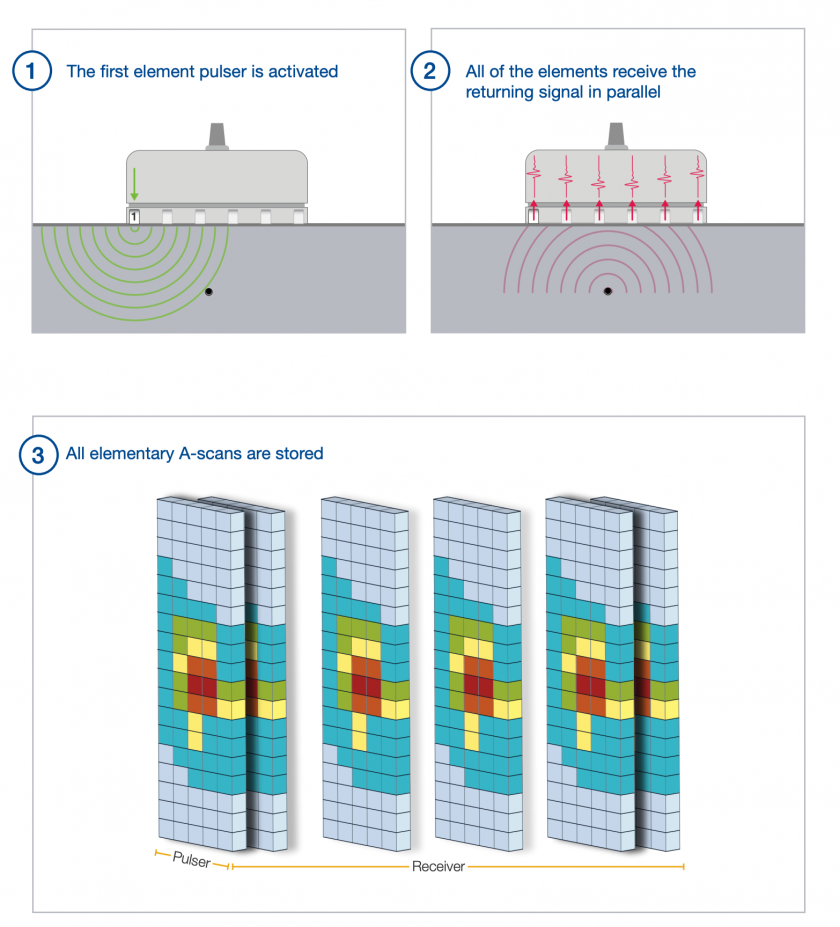
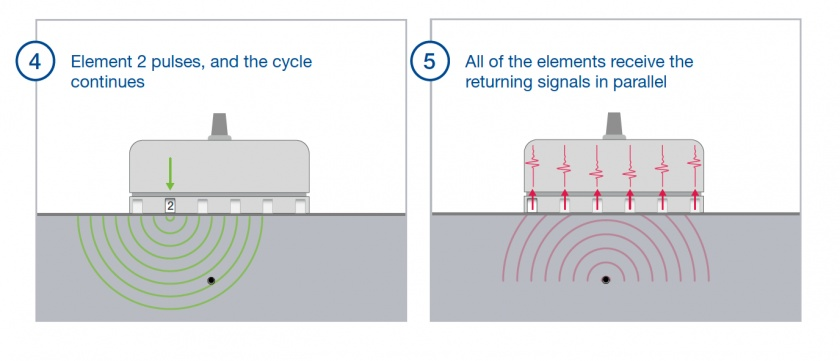
FMC-An采集策略
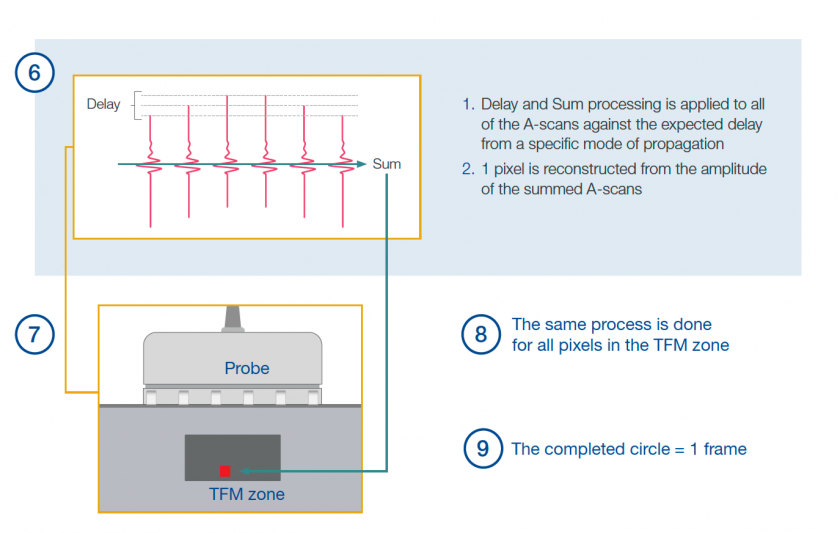
TFM–圖像重構(gòu)
如果使用PAUT采集策略(即每幀需要一次采集)進(jìn)行總聚焦,則生成TFM圖像的時(shí)間將顯著增加。在TFM中,組成圖像的像素?cái)?shù)遠(yuǎn)遠(yuǎn)高于生成s掃描所需的離散角度數(shù)。例如,掃描100個(gè)角度的S-scan需要100次獲取,而100×100像素的TFM圖像需要10,000次獲取。為了避免這個(gè)問題,使用了另一種獲取策略,其中幀在后期處理中計(jì)算,如圖2所示。這種策略需要一組對(duì)應(yīng)于每個(gè)像素位置的焦點(diǎn)定律,以及一組稱為全矩陣捕獲(FMC)的原始基本波形。有了這兩個(gè)元素,基本波形可以延遲和適當(dāng)?shù)乩奂樱瑥亩C合產(chǎn)生超聲波波束,無論是在發(fā)射還是接收,并聚焦在每個(gè)像素位置。因此生成的圖像是“到處聚焦”的。
融合獲得所有的波形之間的所有單個(gè)雙探針元素。完整的探測(cè)器孔徑通常用作它給給定探針設(shè)計(jì)的最佳聚焦的結(jié)果。在這種情況下,收購構(gòu)建融合所需的數(shù)量等于探測(cè)器的元素的數(shù)量。融合包含關(guān)于每個(gè)元素之間的聲傳播的所有信息的調(diào)查,包括界面反射和散射的缺陷。任何類型的PAUT收購可以使用融合重構(gòu),包括扇形掃描,平面波成像(預(yù)警指示器),動(dòng)態(tài)聚焦深度(DDF),等等。
使用FMC獲取過程,生成圖像所需的獲取次數(shù)與PAUT大致相同,但是存儲(chǔ)單個(gè)FMC數(shù)據(jù)集需要很大的存儲(chǔ)容量、傳輸帶寬和處理能力。根據(jù)所用設(shè)備的電子特性,獲得TFM/FMC結(jié)果可能比PAUT慢。
用一個(gè)實(shí)驗(yàn)案例說明PAUT和TFM圖像的區(qū)別
為了說明PAUT和TFM成像的區(qū)別,提出了一種裝置,該裝置使用線性相控陣(PA)探頭掃描垂直分布在鋼塊內(nèi)的相同側(cè)鉆孔(SDHs)。
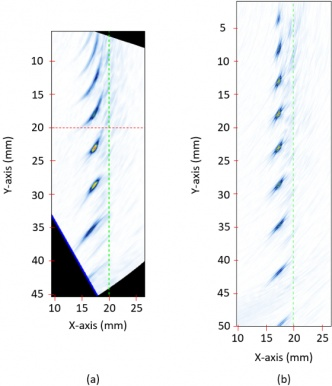
使用OmniScan™X3探傷儀,通過相同的檢查配置獲得的PAUT S-scan (A)和TFM圖像(b)如下圖所示。
在s掃描中,每一幀都是使用20毫米的唯一焦距(用一條紅色虛線表示)獲得的。位于焦點(diǎn)區(qū)域的SDHs具有相似的振幅和大小。對(duì)于這樣的焦距,與較短的焦距相比,圖像分辨率最佳的區(qū)域更大,這解釋了這個(gè)結(jié)果。距離焦深較遠(yuǎn)的SDHs出現(xiàn)畸變,且振幅明顯較低。為了使所有SDHs的尺寸更一致,需要一些具有不同焦距的圖像。
在TFM圖像(b)中,超聲波束聚焦在每個(gè)像素上。正如您所看到的,每個(gè)SDHs都具有最佳的分辨率,并且只需要一張圖像就可以在較大的深度范圍內(nèi)充分調(diào)整SDHs的大小。然而,對(duì)于位于電子聚焦能力末端的SDHs,可以觀察到橫向畸變。這種失真是PA成像固有的,因此仍然存在于TFM圖像中。

TFM/FMC采集的優(yōu)勢(shì)總結(jié)
TFM和PAUT的主要區(qū)別在于組成圖像的幀數(shù)和幀的性質(zhì)。
在PAUT中,幀是一維信號(hào)或a掃描。只有實(shí)時(shí)的前端電子求和作為后處理,幀被動(dòng)態(tài)獲取和呈現(xiàn)。
另一方面,TFM幀是來自聚焦在每個(gè)像素坐標(biāo)上的光束的零維數(shù)據(jù)點(diǎn)。因此,TFM中要處理的幀數(shù)要比PAUT中多得多。在后處理過程中,F(xiàn)MC采集過程需要合成聚焦光束。
TFM的主要優(yōu)點(diǎn)是,與PAUT生成的圖像相比,整個(gè)圖像的顯示具有最佳的分辨率,PAUT生成的圖像只在波束的焦點(diǎn)區(qū)域有較高的分辨率。在使用全聚焦法時(shí),一個(gè)值得注意的限制是電子聚焦能力,這是相控陣成像的局限性。